Who Gave that Robot a Nose? We did!
In late 2023, we purchased a robot called the temi 3 (available here). This robot features a large touch screen, LIDAR for obstacle avoidance, and text-to-speech/natural language processing/automatic speech recognition included without the need for setting up or training. The tablet attached to the top of the robot runs on Android and controls all functions of the robot (through an open-source SDK). Temi demos and videos are available on the Robot Temi YouTube channel.

After learning about all the functionality that is baked into this robot and the vast documentation of its SDK, we were confident that we could use this to develop applications in our environment. There are two projects that we are interested in working on. Both projects involve the smell inspector device to classify smells.
Analyzing Smells in Hospital Rooms
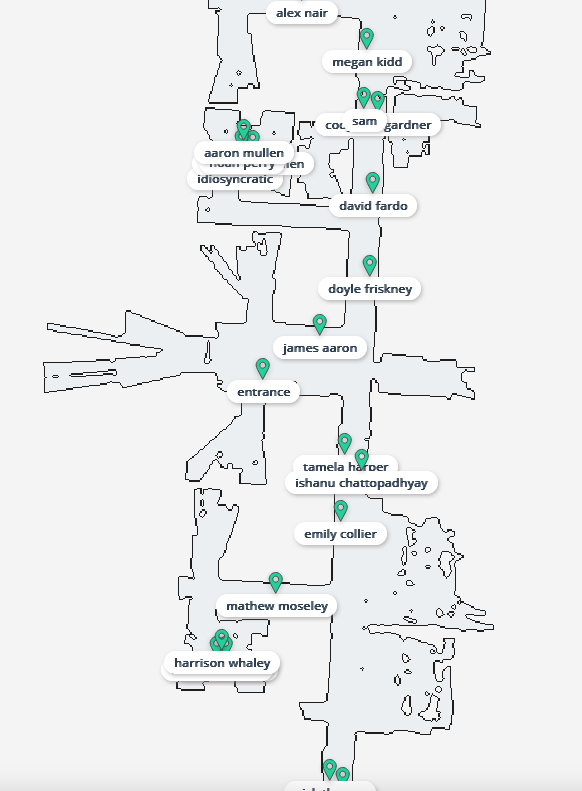
First, we want to detect if urine or stool was present in a patient’s hospital room. This is in early development, and testing of this is taking place within our own office. Temi comes with “patrol” mode, which visits all predefined waypoints on a floor map. To allow temi to roam freely, the robot needed to be led around our floor to get a map of the area and to add waypoints (e.g., Cody’s office, Snack Room, Conference Room). Once complete, we could programmatically start a patrol using the SDK.
Once the smell sensor is mounted and connected via USB to the temi, we can interface with it through our custom Android app. The data from this sensor is then sent to a server, which predicts a smell and returns a classification. At this time, we have collected ambient air data around the office, but will need to choose one (or more) other smells to detect (likely coffee).

Monitoring Humidity and Temperature of a Floor
Second, monitoring the temperature and humidity of an area. The smell inspector also collects temperature and humidity data along with each measurement. This is useful paired with the patrol mode. Hospitals highly monitor the temperature and humidity of a floor as they must keep these metrics in acceptable ranges. Using this robot to patrol a floor while collecting these measurements allows us to present real-time data (or heatmaps) to the appropriate parties. This is in contrast to mounting sensors throughout a floor, which can get costly and be difficult to maintain. This will use the same physical Android app set up as described previously. This project has not been started yet, but we envision that this temperature and humidity data will be sent to a website for viewing and a server to send alerts if either metric is out of range.
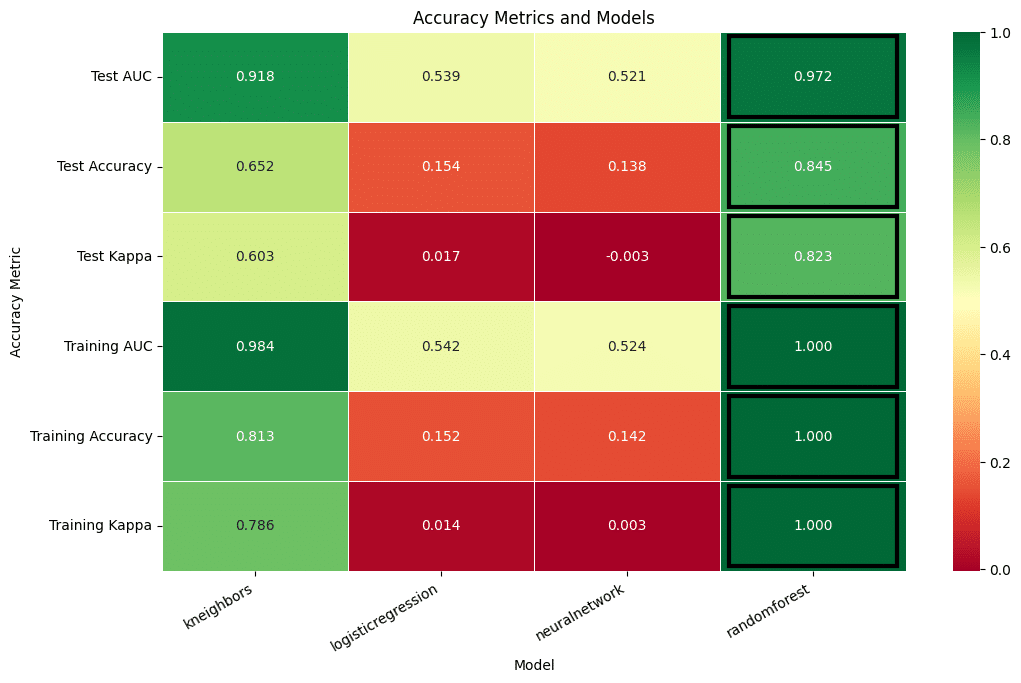
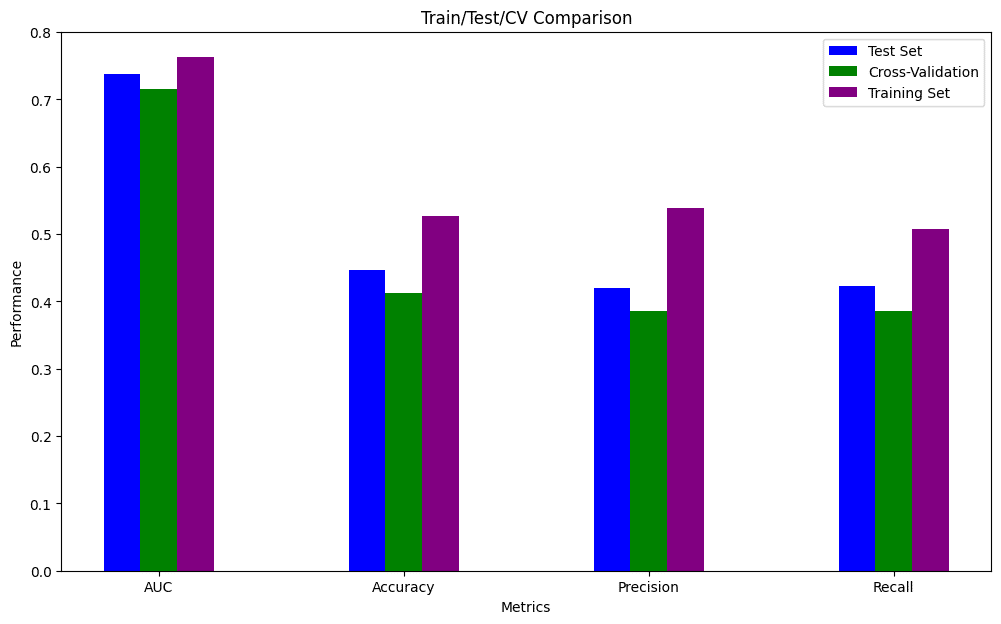
Results
The following are results from data collected around our office suite, determining the location the robot is at based on the smell of the area. Results were produced from the CLASSify platform.